Chambolle-Pock¶
This document is devoted to the resolution of discrete mean field games via Chambolle-Pock algorithm in the euclidean setting (see [CP11]).
Packages¶
import numpy as np
from numpy import random
from mpl_toolkits import mplot3d
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import time
Algorithms¶
Chambolle-Pock
The Chambolle Pock algorithm is a primal-dual method which aims at finding a saddle-point in optimization problems of the following form:
for any \(F\), \(G\) l.s.c. convex and proper functions. In our case, we have the following saddle point problem:
Identifying the terms, the Chambolle Pock algorithm is given by :
find
find
update
Data of the problem¶
def initial_mass(n):
m_bar = np.zeros(n)
for x in range(n):
m_bar[x] = np.exp(-(x-n/2)**2/(n/4)**2)
return(n*m_bar/np.sum(m_bar))
def displacement_cost(T,n):
dx=1/n
dt=1/T
disp = np.zeros((T-1,n,n))
for t in range(T-1):
for x in range(n):
for y in range(n):
disp[t,x,y] = ((y-x)*dx/dt)**2/4
return(disp)
def penalisation_congestion(T,n):
nu = np.zeros((T,n))
for t in range(T):
if t > T/4 and t < T/2:
for x in range(n):
if x > n/2:
nu[t,x] = 10
return(nu)
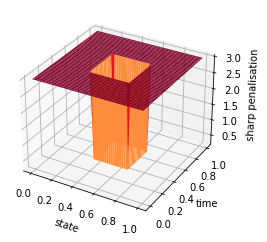
def sharp_penalisation_congestion(T,n):
eta = np.zeros((T,n)) + 3
for t in range(T):
for x in range(n):
if (t > T/3 and t < 2*T/3) and (x > n/3 and x < 2*n/3):
eta[t,x] = 1/4
return(eta)
def reference_demand(T):
new_D_bar = np.zeros(T-1)
for t in range(T-1):
new_D_bar[t] = np.sin(t*(4*np.pi)/(T-1))
return(new_D_bar)
def alpha_cost(T,n):
dx=1/n
dt=1/T
disp = np.zeros((T-1,n,n))
for t in range(T-1):
for x in range(n):
for y in range(n):
disp[t,x,y] = (y-x)*dx/dt
return(disp)
Computation of Chambolle-Pock steps¶
Computation of \((P^{n+1},u^{n+1},\gamma^{n+1})\)
For any \((k_1,k_2,k_3) \in \mathcal{K}\) we have that
Then we have that
Computation of \(P^{n+1}\)
def prox_P(P,D,w,T,n,sigma,alpha):
dx=1/n
return(P + sigma*(np.sum(alpha*w*dx)-D))
Computation of \(u^{n+1}\)
def prox_u(u,m_1,w,m_0,sigma,T,n):
dt=1/T
new_u = np.zeros((T,n))
for t in range(T):
if t==0:
new_u[t] = u[t] + sigma*(m_0-m_1[t])
else:
for x in range(n):
new_u[t,x] = u[t,x] + sigma*(np.sum(w[t-1,:,x]) - m_1[t,x])/dt
return new_u
Computation of \(\gamma^{n+1}\)
def prox_gamma(gamma,m_1,m_2,sigma):
return(gamma + sigma*(m_1-m_2))
Computation of \((m_1^{n+1},m_2^{n+1},w^{n+1},D^{n+1})\)
The difficulty here comes from the domain of \(\ell\). Thus we use the Moreau’s identity. We set \(c = (c_1,c_2,c_3,c_4) \in \mathcal{C}\),
Then we have
By the by the Moreau’s identity we have that
where
For \(t = T\) we have that
\((m_1^{n+1},w^{n+1})\) is given by
\(m_2^{n+1}\) is given by
\(D^{n+1}\) is given by
Computation of \(D^{n+1}\)
We have that
def prox_phi_star_quad(X,Db,D_0,tau,T,n,D_min,D_max):
argmin = (X - tau*D_0*Db)/(1 + tau*D_0)
if argmin > D_max:
argmin = D_max
if argmin < D_min:
argmin = D_min
return(argmin)
def Local_D_prox_quad(D,P,T,n,tau,Db,D_0,D_min,D_max):
c= D + tau*P
new_Dt = prox_phi_star_quad(c,Db,D_0,tau,T,n,D_min,D_max)
return(new_Dt)
def D_prox_quad(D,P,T,n,tau,alpha,Db,D_0,D_min,D_max):
new_D = np.zeros(T-1)
for t in range(T-1):
new_D[t] = Local_D_prox_quad(D[t],P[t],T,n,tau,Db[t],D_0,D_min,D_max)
return new_D
Computation of \(m_2^{n+1}\)
def prox_coeff_F_sharp(X,nu,eta,coeff):
argmin = (X - coeff*nu)/(coeff + 1)
if argmin>eta:
argmin = eta
if argmin<0:
argmin = 0
return(argmin)
def m_2_prox(m_2,gamma,nu,eta,tau,T,n):
m_2_new = np.zeros((T,n))
c_2 = 0
for t in range(T):
for x in range(n):
c_2 = m_2[t,x] + tau*gamma[t,x]
m_2_new[t,x] = prox_coeff_F_sharp(c_2,nu[t,x],eta[t,x],tau)
return(m_2_new)
Computation of \((m_1^{n+1},w^{n+1})\)
def proj_Q(a_bar,b_bar,beta,n):
a = 0
b = np.zeros(n)
beta_bar = beta-b_bar
beta_bar_sort = np.sort(beta_bar)
k = 0
sum_beta_bar_sort = 0
derivative_beta = (k+1)*beta_bar_sort[k] - a_bar - sum_beta_bar_sort
while (derivative_beta < 0) and (k < n-1):
sum_beta_bar_sort = sum_beta_bar_sort + beta_bar_sort[k]
k = k+1
derivative_beta = (k+1)*beta_bar_sort[k] - a_bar - sum_beta_bar_sort
if (k==n-1) and (derivative_beta < 0):
sum_beta_bar_sort = sum_beta_bar_sort + beta_bar_sort[k]
k = n
a = (a_bar + sum_beta_bar_sort)/(k+1)
for y in range(n):
b[y] = np.min(np.array([b_bar[y],beta[y] - a]))
return (a,b)
def m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta):
dt = 1/T
dx=1/n
(new_m_1,new_w) = (np.zeros((T,n)),np.zeros((T-1,n,n)))
for t in range(T-1):
for x in range(n):
c_1 = m_1[t,x] - tau*(-u[t,x]/dt + gamma[t,x])
c_3 = w[t,x] - tau*(alpha[t,x]*P[t] + u[t+1]/dt)
(a,b) = proj_Q(c_1/tau,c_3/tau,beta[t,x],n)
new_m_1[t,x] = c_1 - tau*a
new_w[t,x] = c_3 - tau*b
new_m_1[T-1] = m_1[T-1] - tau*(-u[T-1] + gamma[T-1])
return (new_m_1,new_w)
Computation of \((\bar{m}_1^{n+1},\bar{m}_2^{n+1},\bar{w}^{n+1})\)
def relax(var_m_1,var_m_2,var_w,var_D,m_1,m_2,w,D,theta):
m_1_bar = var_m_1 + theta*(var_m_1-m_1)
m_2_bar = var_m_2 + theta*(var_m_2-m_2)
w_bar = var_w + theta*(var_w-w)
D_bar = var_D + theta*(var_D-D)
return(m_1_bar,m_2_bar,w_bar,D_bar)
Strategy \(\pi = w/m\) and average strategy
def equilibrium_strategy(m,w,T,n,tol=1e-5):
strat = np.zeros((T-1,n,n))
for t in range(T-1):
for x in range(n):
if m[t,x] > tol:
strat[t,x] = w[t,x]/m[t,x]
return(strat)
def mean_field_strategy(pi,T,n):
mfs = np.zeros((T-1,n))
for t in range(T-1):
for x in range(n):
for y in range(n):
mfs[t,x] += pi[t,x,y]*(y-x)
return(mfs)
def ergodic(var_m_1,var_m_2,var_w,var_D,var_u,var_gamma,var_P,m_1,m_2,w,D,u,gamma,P,k):
m_1_bar = var_m_1/(k+1) + k*m_1/(k+1)
m_2_bar = var_m_2/(k+1) + k*m_2/(k+1)
w_bar = var_w/(k+1) + k*w/(k+1)
D_bar = var_D/(k+1) + k*D/(k+1)
u_bar = var_u/(k+1) + k*u/(k+1)
gamma_bar = var_gamma/(k+1) + k*gamma/(k+1)
P_bar = var_P/(k+1) + k*P/(k+1)
return(m_1_bar,m_2_bar,w_bar,D_bar,u_bar,gamma_bar,P_bar)
Computation of \(\|\mathcal{A}\|\)
A key condition in the Chambolle-Pock algorithm is given by \( \sigma \tau L^2 < 1\) where \(L = \|\mathcal{A}\|\). For any \((m_1,m_2,w,D) \in \hat{\mathcal{K}}\) we have that
where
Thus
Finally
def norm_A(alpha,n,T):
dt=1/T
dx = 1/n
norm_alpha = 0
for x in range(n):
norm_alpha = norm_alpha + np.sum(alpha[0,x]**2)
return(np.sqrt(2*(n/(dt**2) + norm_alpha)))
Reconstruction of \((u,\pi[u])\)
def d_p_mapping(m,w,gamma,P,alpha,beta,T,n,tol = 1e-3,mfg=1):
dt=1/T
dx=1/n
new_u = np.zeros((T,n))
new_pi = np.zeros((T-1,n,n))
f = np.zeros((T,n))
if mfg == 1:
f = gamma
new_u[T-1] = f[T-1]
for t in range(T-1):
for x in range(n):
cost = np.zeros(n)
cost = beta[T-2-t,x]*dt + alpha[T-2-t,x]*P[T-2-t]*dt + new_u[T-1-t]
argmin = np.argmin(cost)
if m[T-2-t,x]*dx>tol:
new_pi[T-2-t,x] = w[T-2-t,x]/m[T-2-t,x]
else:
new_pi[T-2-t,x,argmin] = 1
new_u[T-2-t,x] = cost[argmin] + f[T-2-t,x]*dt
return(new_u,new_pi)
Error function
def verification(P,u,gamma,m,pi,w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta,mfg = 1):
cost = np.zeros((T-1,n))
Delta_u = np.zeros((T,n))
Delta_pi = np.zeros((T-1,n,n))
Delta_m = np.zeros((T,n))
Delta_gamma = np.zeros((T,n))
Delta_P = np.zeros(T-1)
demand = np.zeros((T-1,n,n))
dt=1/T
dx=1/n
f = np.zeros((T,n))
if mfg == 1:
f = gamma
Delta_m[0] = abs(m[0] - m_0)*dx
for x in range(n):
Delta_u[T-1,x] = abs(u[T-1,x] - f[T-1,x])*dx
for t in range(T-1):
for x in range(n):
arg = beta[t,x]*dt + alpha[t,x]*P[t]*dt + u[t+1]
demand[t,x] = pi[t,x]*m[t,x]*alpha[t,x]*dx
cost[t,x] = np.sum(pi[t,x]*(beta[t,x]*dt + alpha[t,x]*P[t]*dt)) + f[t,x]*dt
Delta_pi[t,x] = abs(np.sum(pi[t,x]*arg) - np.sort(arg)[0])*dx
Delta_m[t+1,x] = abs(m[t+1,x] - np.sum(pi[t,:,x]*m[t]))*dx
Delta_u[t,x] = abs(u[t,x] - cost[t,x] - np.sum(pi[t,x]*u[t+1]))*dx
if gamma[t,x] < nu[t,x]:
Delta_gamma[t,x] = abs(gamma[t,x])*dt*dx
elif gamma[t,x] > eta[t,x] + nu[t,x]:
Delta_gamma[t,x] = abs(gamma[t,x] - eta[t,x])*dt*dx
else:
Delta_gamma[t,x] = abs(gamma[t,x] - m[t,x] - nu[t,x])*dt*dx
D = np.sum(demand[t])
if P[t] > D_0*(Db[t]+Dmax):
Delta_P[t] = abs(P[t]-D_0*(Db[t]+Dmax))*dt
elif P[t] < D_0*(Db[t]+Dmin):
Delta_P[t] = abs(P[t]-D_0*(Db[t]+Dmin))*dt
else:
Delta_P[t] = abs(P[t]- D_0*(Db[t]+D))*dt
return (np.sum(Delta_u),np.sum(Delta_pi),np.sum(Delta_m),np.sum(Delta_P),np.sum(Delta_gamma))
Local transition version¶
tran_0 = np.array([0,1])
tran_interm = np.array([-1,0,1])
tran_n = np.array([-1,0])
def tran(x,n):
if x == 0:
return(tran_0)
if x == n-1:
return(tran_n)
else:
return(tran_interm)
def norm_A(alpha,n,T):
dt=1/T
norm_alpha = 0
cst = 0
for x in range(n):
Y = tran(x,n) + x
norm_alpha = norm_alpha + np.sum(alpha[0,x,Y]**2)
if len(Y)>cst:
cst = len(Y)
return(np.sqrt(2*(cst/(dt**2) + norm_alpha)))
def m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta):
dt = 1/T
dx=1/n
(new_m_1,new_w) = (np.zeros((T,n)),np.zeros((T-1,n,n)))
for t in range(T-1):
for x in range(n):
Y = tran(x,n) + x
c_1 = m_1[t,x] - tau*(-u[t,x]/dt + gamma[t,x])
c_3 = w[t,x,Y] - tau*(alpha[t,x,Y]*P[t] + u[t+1,Y]/dt)
(a,b) = proj_Q(c_1/tau,c_3/tau,beta[t,x,Y],n,Y)
new_m_1[t,x] = c_1 - tau*a
new_w[t,x,Y] = c_3 - tau*b
new_m_1[T-1] = m_1[T-1] - tau*(-u[T-1] + gamma[T-1])
return (new_m_1,new_w)
def proj_Q(a_bar,b_bar,beta,n,Y):
lenY = len(Y)
a = 0
b = np.zeros(lenY)
beta_bar = beta-b_bar
beta_bar_sort = np.sort(beta_bar)
k = 0
sum_beta_bar_sort = 0
derivative_beta = (k+1)*beta_bar_sort[k] - a_bar - sum_beta_bar_sort
while (derivative_beta < 0) and (k < lenY-1):
sum_beta_bar_sort = sum_beta_bar_sort + beta_bar_sort[k]
k = k+1
derivative_beta = (k+1)*beta_bar_sort[k] - a_bar - sum_beta_bar_sort
if (k==lenY-1) and (derivative_beta < 0):
sum_beta_bar_sort = sum_beta_bar_sort + beta_bar_sort[k]
k = lenY
a = (a_bar + sum_beta_bar_sort)/(k+1)
for y in range(lenY):
b[y] = np.min(np.array([b_bar[y],beta[y] - a]))
return (a,b)
def prox_P(P,D,w,T,n,sigma,alpha):
dx=1/n
new_P = np.zeros(T-1)
for t in range(T-1):
result = 0
for x in range(n):
Y = tran(x,n) + x
result += np.sum(alpha[t,x,Y]*w[t,x,Y])
new_P[t] = P[t] + sigma*(result*dx - D[t])
return new_P
def prox_u(u,m_1,w,m_0,sigma,T,n):
dt=1/T
new_u = np.zeros((T,n))
for t in range(T):
if t==0:
new_u[t] = u[t] + sigma*(m_0-m_1[t])
else:
for x in range(n):
Y = tran(x,n) + x
new_u[t,x] = u[t,x] + sigma*(np.sum(w[t-1,Y,x]) - m_1[t,x])/dt
return new_u
def d_p_mapping(m,w,gamma,P,alpha,beta,T,n,tol = 1e-3,mfg=1):
dt=1/T
dx=1/n
new_u = np.zeros((T,n))
new_pi = np.zeros((T-1,n,n))
f = np.zeros((T,n))
if mfg == 1:
f = gamma
new_u[T-1] = f[T-1]
for t in range(T-1):
for x in range(n):
cost = np.zeros(n)
Y = tran(x,n) + x
cost[Y] = beta[T-2-t,x,Y]*dt + alpha[T-2-t,x,Y]*P[T-2-t]*dt + new_u[T-1-t,Y]
argmin = np.argmin(cost[Y])
if m[T-2-t,x]*dx>tol:
new_pi[T-2-t,x,Y] = w[T-2-t,x,Y]/m[T-2-t,x]
else:
new_pi[T-2-t,x,Y[argmin]] = 1
new_u[T-2-t,x] = cost[Y[argmin]] + f[T-2-t,x]*dt
return(new_u,new_pi)
def verification(P,u,gamma,m,pi,w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta,mfg = 1):
cost = np.zeros((T-1,n))
Delta_u = np.zeros((T,n))
Delta_pi = np.zeros((T-1,n,n))
Delta_m = np.zeros((T,n))
Delta_gamma = np.zeros((T,n))
Delta_P = np.zeros(T-1)
demand = np.zeros((T-1,n,n))
dt=1/T
dx=1/n
f = np.zeros((T,n))
if mfg == 1:
f = gamma
Delta_m[0] = abs(m[0] - m_0)*dx
for x in range(n):
Delta_u[T-1,x] = abs(u[T-1,x] - f[T-1,x])*dx
for t in range(T-1):
for x in range(n):
Y = tran(x,n) + x
arg = beta[t,x,Y]*dt + alpha[t,x,Y]*P[t]*dt + u[t+1,Y]
demand[t,x,Y] = pi[t,x,Y]*m[t,x]*alpha[t,x,Y]*dx
cost[t,x] = np.sum(pi[t,x,Y]*(beta[t,x,Y]*dt + alpha[t,x,Y]*P[t]*dt)) + f[t,x]*dt
Delta_pi[t,x] = abs(np.sum(pi[t,x,Y]*arg) - np.sort(arg)[0])*dx
Delta_m[t+1,x] = abs(m[t+1,x] - np.sum(pi[t,Y,x]*m[t,Y]))*dx
Delta_u[t,x] = abs(u[t,x] - cost[t,x] - np.sum(pi[t,x,Y]*u[t+1,Y]))*dx
if gamma[t,x] < 0:
Delta_gamma[t,x] = abs(m[t,x])*dt*dx
elif gamma[t,x] > eta[t,x] + nu[t,x]:
Delta_gamma[t,x] = abs(m[t,x] - eta[t,x])*dt*dx
else:
Delta_gamma[t,x] = abs(gamma[t,x] - m[t,x])*dt*dx
D = np.sum(demand[t])
if P[t] > D_0*(Db[t]+Dmax):
Delta_P[t] = abs(D-Dmax)*dt
elif P[t] < D_0*(Db[t]+Dmin):
Delta_P[t] = abs(D-Dmin)*dt
else:
Delta_P[t] = abs(D- (P[t]/D_0 - Db[t]))*dt
return (np.sum(Delta_u),np.sum(Delta_pi),np.sum(Delta_m),np.sum(Delta_P),np.sum(Delta_gamma))
Classical Chambolle-Pock¶
MFG¶
T = 50
n = 50
alpha = np.zeros((T-1,n,n))
L = norm_A(alpha,n,T)+1
sigma = 1/(L)
tau = 1/(L)
theta = 1
Dmin = -10
Dmax = 10
beta = displacement_cost(T,n)
#nu = penalisation_congestion(T,n)
nu = np.zeros((T,n))
eta = sharp_penalisation_congestion(T,n)
m_0 = initial_mass(n)
var_m_1 = np.zeros((T,n)) + 1
var_m_2 = var_m_1
var_w = np.zeros((T-1,n,n)) + 1
D_0 = 1
Db = np.zeros(T-1)
P = np.zeros(T-1)
D = np.zeros(T-1)
u = np.zeros((T,n)) + 1
gamma = np.random.rand(T,n)
var_D = D
(m_1_bar,m_2_bar,w_bar,D_bar) = (var_m_1,var_m_2,var_w,var_D)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = (m_1_bar,m_2_bar,w_bar,D_bar,u,gamma,P)
N = 10000
start = time.time()
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
#P = prox_P(P,D_bar,w_bar,n,alpha)
u = prox_u(u,m_1_bar,w_bar,m_0,sigma,T,n)
gamma = prox_gamma(gamma,m_1_bar,m_2_bar,sigma)
(m_1,m_2,w,D) = (var_m_1,var_m_2,var_w,var_D)
#var_D = D_prox_quad(D,P,T,n,tau,alpha,D_bar,D_0)
var_m_2 = m_2_prox(m_2,gamma,nu,eta,tau,T,n)
(var_m_1,var_w) = m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta)
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,m_1,m_2,w,D,theta)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(var_m_1,var_m_2,var_w,var_D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4547.07 s
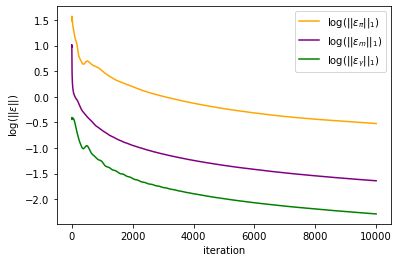
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
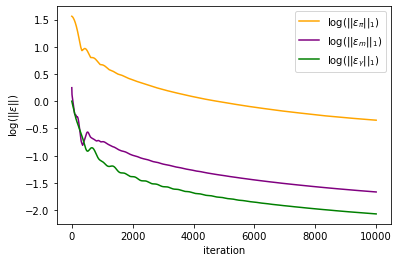
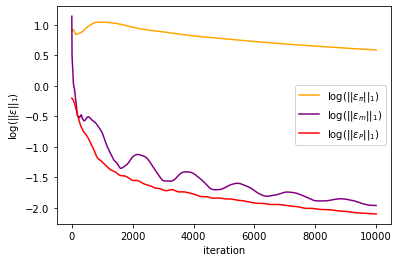
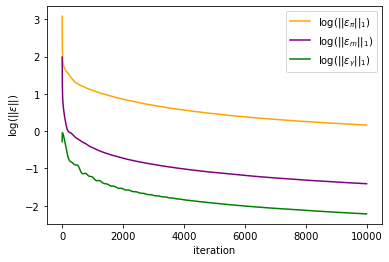
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
#plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||)$')
plt.legend()
plt.savefig('chambolle_pock_mfg_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = nu
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('penalisation')
Text(0.5, 0, 'penalisation')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = eta
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('sharp penalisation')
Text(0.5, 0, 'sharp penalisation')
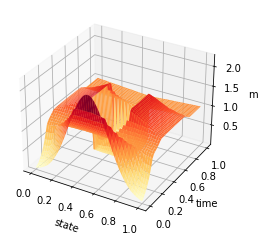
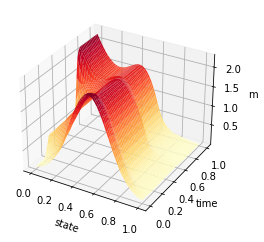
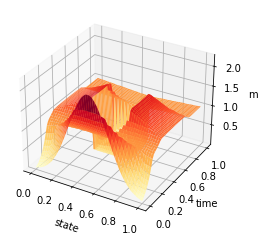
X, Y = np.meshgrid(y, t)
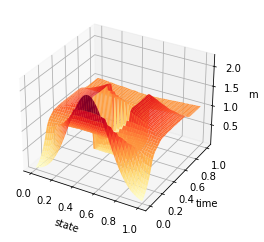
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='YlOrRd')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('chambolle_pock_mfg_constraint_m.png',dpi=500, bbox_inches='tight')
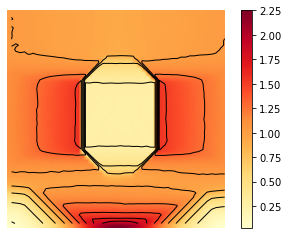
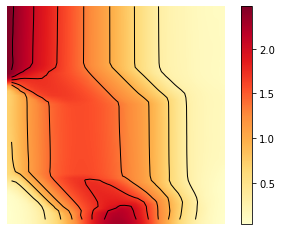
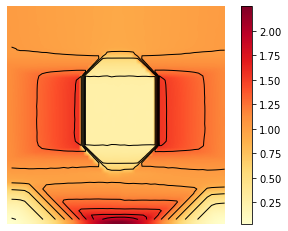
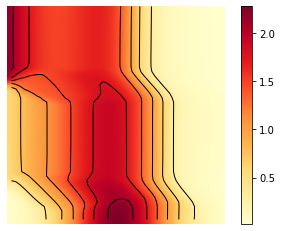
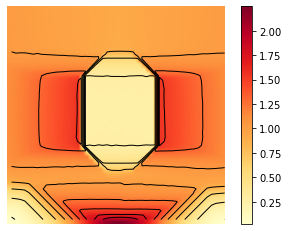
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfg_constraint_m_contour.png', dpi=500, bbox_inches='tight')
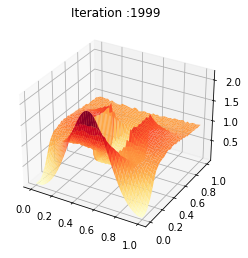
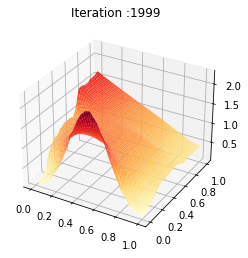
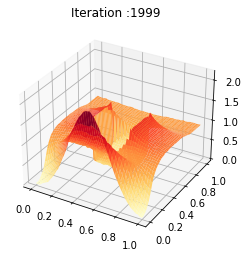
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
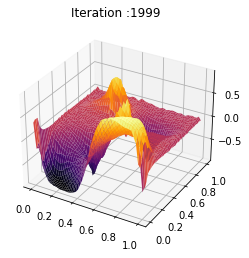
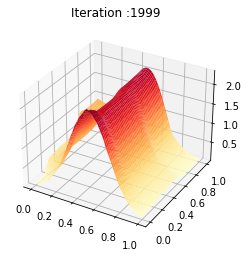
Z = ev_m[:Nb_im]
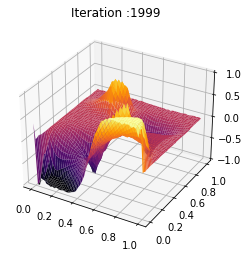
def update_plot(frame_number, zarray, plot):
plot[0].remove()
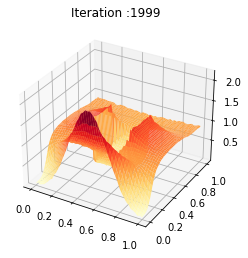
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfg_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
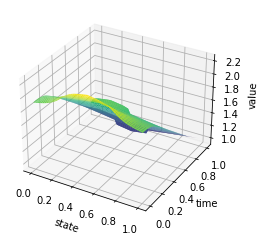
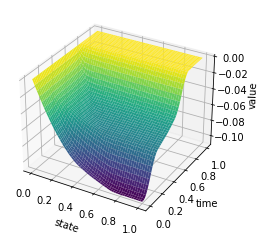
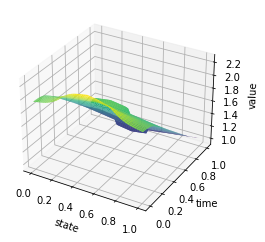
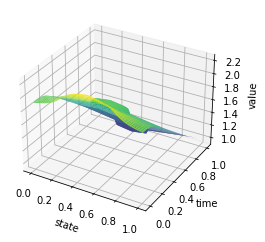
X, Y = np.meshgrid(y, t)
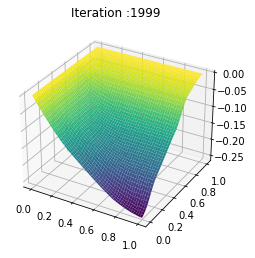
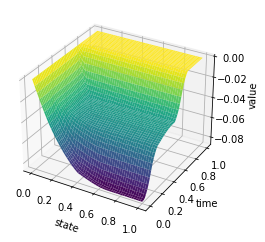
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
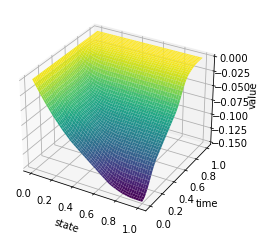
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('chambolle_pock_mfg_constraint_u.png',dpi=500, bbox_inches='tight')
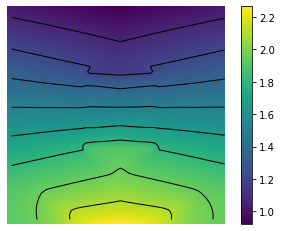
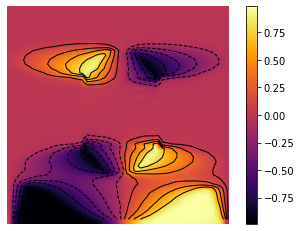
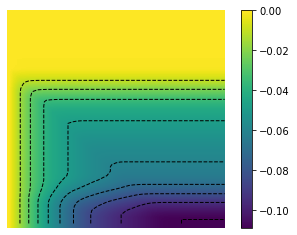
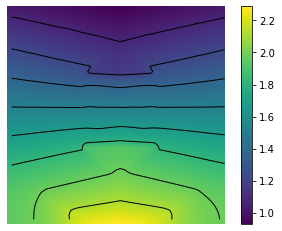
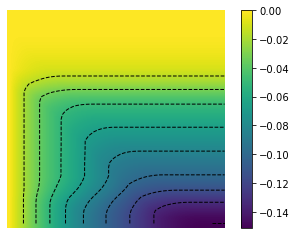
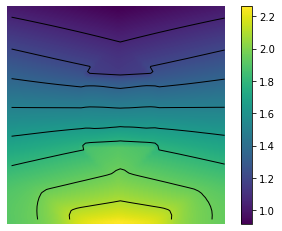
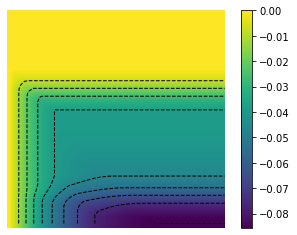
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(U)
maxu = np.max(U)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfg_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
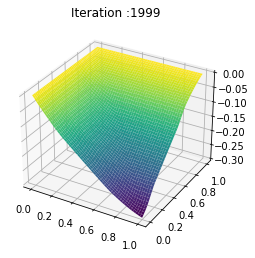
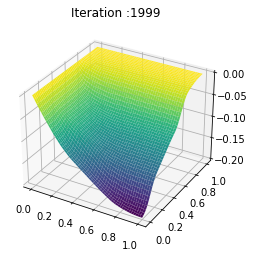
Z = ev_u[:Nb_im]
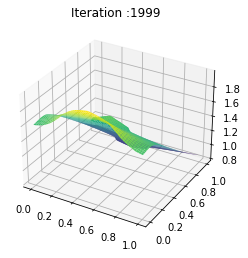
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfg_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
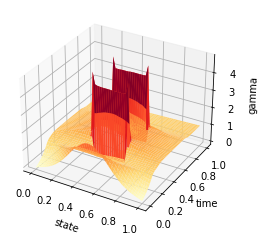
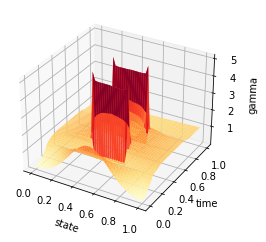
X, Y = np.meshgrid(y, t)
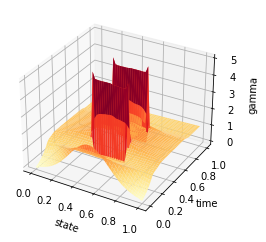
Z = av_gamma
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('gamma')
plt.savefig('chambolle_pock_mfg_constraint_gamma.png',dpi=500, bbox_inches='tight')
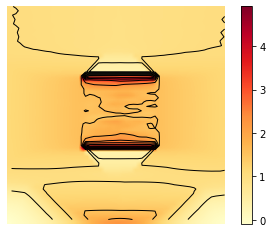
X, Y = np.meshgrid(t, y)
mingamma = np.min(Z)
maxgamma = np.max(Z)
levels = np.linspace(mingamma,maxgamma,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_constraint_mfg_gamma_contour.png', dpi=500, bbox_inches='tight')
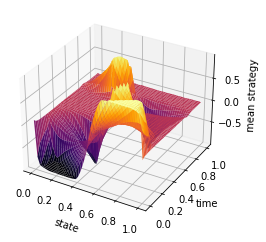
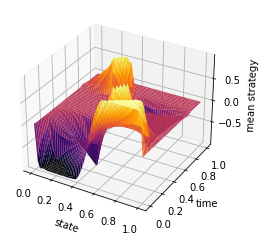
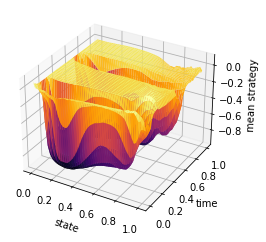
Equilibrium strategy
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
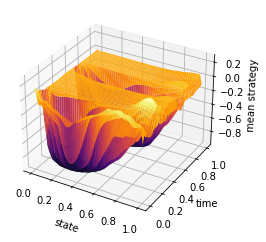
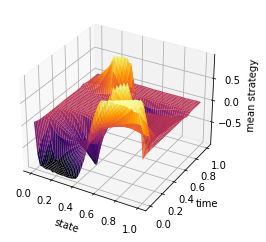
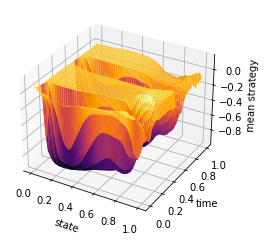
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('chambolle_pock_mfg_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
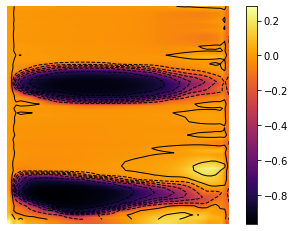
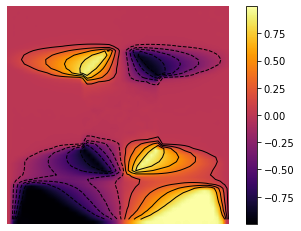
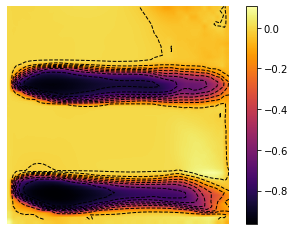
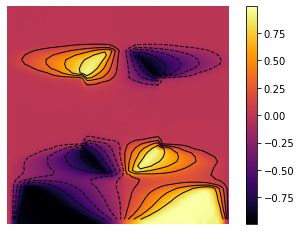
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfg_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
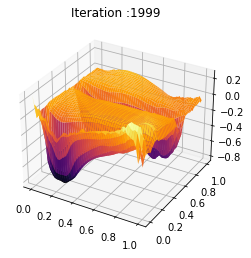
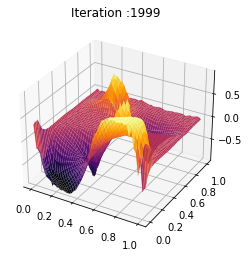
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfg_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
MFGC¶
N = 10000
T = 50
n = 50
alpha = alpha_cost(T,n)
L = norm_A(alpha,n,T) + 1
sigma = 1/L
tau = 1/L
theta = 1
Dmin = -2
Dmax = 0
beta = displacement_cost(T,n)
nu = np.zeros((T,n))
D_0 = 1/2
Db = reference_demand(T)*2
m_0 = initial_mass(n)
var_m_1 = np.zeros((T,n)) + 1
var_m_2 = var_m_1
var_w = np.zeros((T-1,n,n)) + 1
var_D = Db
P = np.random.rand(T-1)
u = np.random.rand(T,n)
gamma = np.zeros((T,n))
(m_1_bar,m_2_bar,w_bar,D_bar) = (var_m_1,var_m_2,var_w,var_D)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = (m_1_bar,m_2_bar,w_bar,D_bar,u,gamma,P)
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
P = prox_P(P,D_bar,w_bar,T,n,sigma,alpha)
u = prox_u(u,m_1_bar,w_bar,m_0,sigma,T,n)
gamma = prox_gamma(gamma,m_1_bar,m_2_bar,sigma)
(m_1,m_2,w,D) = (var_m_1,var_m_2,var_w,var_D)
var_D = D_prox_quad(D,P,T,n,tau,alpha,Db,D_0,Dmin,Dmax)
(var_m_1,var_w) = m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta)
var_m_2 = m_2 + tau*gamma
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,m_1,m_2,w,D,theta)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(var_m_1,var_m_2,var_w,var_D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4,mfg=0)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta,mfg=0))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4572.4 s
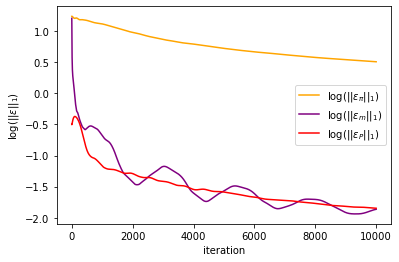
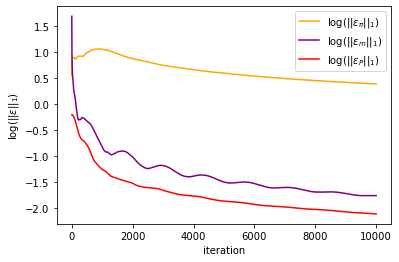
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
#plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||_1)$')
plt.legend()
plt.savefig('chambolle_pock_mfgc_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
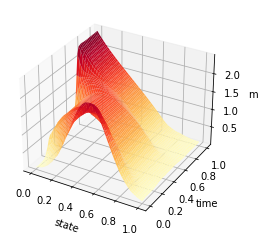
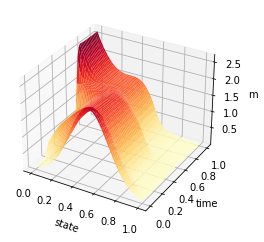
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('chambolle_pock_mfgc_constraint_m.png', dpi=500, bbox_inches='tight')
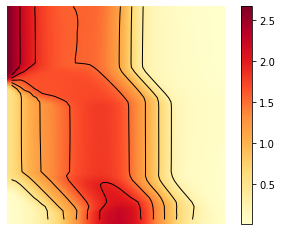
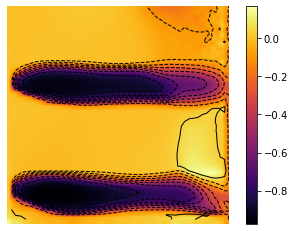
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfgc_constraint_m_contour.png', dpi=500, bbox_inches='tight')
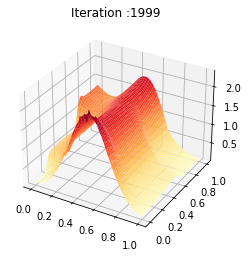
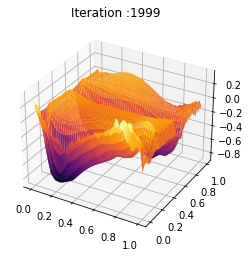
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfgc_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('chambolle_pock_mfgc_constraint_u.png', dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(U)
maxu = np.max(U)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfgc_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_u[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfgc_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
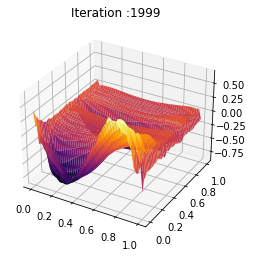
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('chambolle_pock_mfgc_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('chambolle_pock_mfgc_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('chambolle_pock_mfgc_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
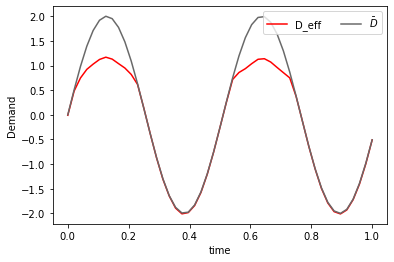
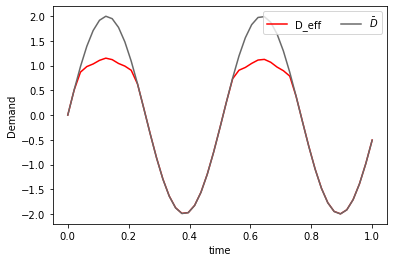
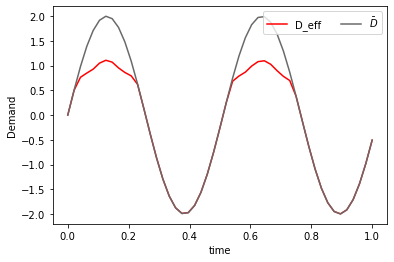
def real_demand(Db,D_0,alpha,w,T,n):
dx = 1/n
D_eff = np.zeros(T-1)
for t in range(T-1):
D_eff[t] = (np.sum(alpha[t]*w[t])*dx + Db[t])
return(D_eff)
plt.plot(np.linspace(0,1,T-1),real_demand(Db,D_0,alpha,av_w,T,n), 'r-',label='D_eff')
plt.plot(np.linspace(0,1,T-1),Db,'dimgrey', label = r'$\bar{D}$')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Demand')
plt.savefig('chambolle_pock_mfgc_constraint_D.png', dpi=500, bbox_inches='tight')
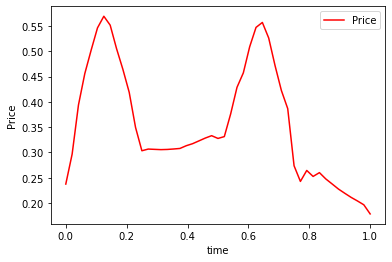
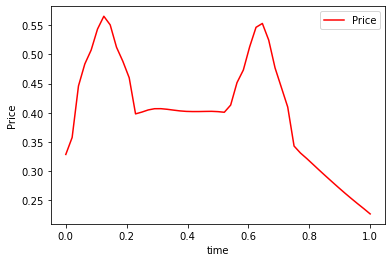
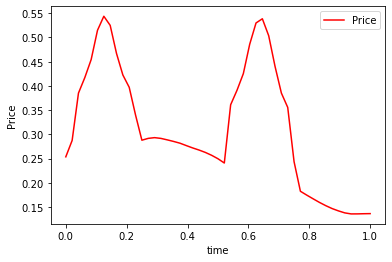
plt.plot(np.linspace(0,1,T-1),av_P, 'r-',label='Price')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Price')
plt.savefig('chambolle_pock_mfgc_constraint_P.png', dpi=500, bbox_inches='tight')
Overrelaxed Chambolle-Pock¶
Overrelaxed Chambolle-Pock
find $\(\xi^{n+1} = \text{prox}_{\tau \mathcal{F}}((m_1^n,m_2^n,w^n) - \tau \mathcal{A}^\circ(P^{n},u^{n},\gamma^{n}))\)$
update
find
update
def convex_comb(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho):
m_1_next = (1-rho)*m_1 + rho*var_m_1
m_2_next = (1-rho)*m_2 + rho*var_m_2
w_next = (1-rho)*w + rho*var_w
D_next = (1-rho)*D + rho*var_D
P_next = (1-rho)*P + rho*var_P
u_next = (1-rho)*u + rho*var_u
gamma_next = (1-rho)*gamma + rho*var_gamma
return(m_1_next,m_2_next,w_next,D_next,P_next,u_next,gamma_next)
MFG¶
T = 50
n = 50
alpha = np.zeros((T-1,n,n))
Dmin = -10
Dmax = 10
L = norm_A(alpha,n,T) + 1
sigma = 1/L
tau = 1/L
theta = 1
rho = 3/2
beta = displacement_cost(T,n)
#nu = penalisation_congestion(T,n)
nu = np.zeros((T,n))
eta = sharp_penalisation_congestion(T,n)
D_0 = 1
Db = np.zeros(T-1)
m_0 = initial_mass(n)
m_1 = np.zeros((T,n))
m_2 = np.zeros((T,n))
w = np.zeros((T-1,n,n))
D = np.zeros(T-1)
var_D = D
P = np.zeros(T-1)
u = np.random.rand(T,n)
gamma = np.random.rand(T,n)
var_P = P
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = (m_1,m_2,w,D,u,gamma,P)
N = 10000
start = time.time()
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
var_m_2 = m_2_prox(m_2,gamma,nu,eta,tau,T,n)
(var_m_1,var_w) = m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta)
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,m_1,m_2,w,D,theta)
var_u = prox_u(u,m_1_bar,w_bar,m_0,sigma,T,n)
var_gamma = prox_gamma(gamma,m_1_bar,m_2_bar,sigma)
(m_1,m_2,w,D,P,u,gamma) = convex_comb(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(m_1,m_2,w,D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4477.54 s
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
#plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||)$')
plt.legend()
plt.savefig('relaxed_chambolle_pock_mfg_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='YlOrRd')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('relaxed_chambolle_pock_mfg_constraint_m.png',dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfg_constraint_m_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfg_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('relaxed_chambolle_pock_mfg_constraint_u.png',dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(Z)
maxu = np.max(Z)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfg_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_u[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfg_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = av_gamma
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('gamma')
plt.savefig('relaxed_chambolle_pock_mfg_constraint_gamma.png',dpi=500, bbox_inches='tight')
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('relaxed_chambolle_pock_mfg_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfg_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfg_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
MFGC¶
L = norm_A(alpha,n,T)
sigma = 1/L
tau = 1/L
theta = 1
Dmin = -2
Dmax = 0
beta = displacement_cost(T,n)
nu = np.zeros((T,n))
eta = np.zeros((T,n))
D_0 = 1/2
Db = reference_demand(T)*2
rho = 3/2
alpha = alpha_cost(T,n)
D_0 = 1/2
Db = reference_demand(T)*2
m_0 = initial_mass(n)
m_1 = np.zeros((T,n))
for t in range(T):
m_1[t] = m_0
m_2 = m_1
w = np.zeros((T-1,n,n))
D = np.zeros(T-1)
P = np.zeros(T-1)
u = np.random.rand(T,n)
gamma = np.zeros((T,n))
var_gamma = gamma
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = (m_1_bar,m_2_bar,w_bar,D_bar,u,gamma,P)
N = 10000
start = time.time()
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
var_D = D_prox_quad(D,P,T,n,tau,alpha,Db,D_0,Dmin,Dmax)
(var_m_1,var_w) = m_1_w_proj(P,gamma,u,m_1,w,T,n,tau,alpha,beta)
var_m_2 = m_2 + tau*gamma
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,m_1,m_2,w,D,theta)
var_P = prox_P(P,D_bar,w_bar,T,n,sigma,alpha)
var_u = prox_u(u,m_1_bar,w_bar,m_0,sigma,T,n)
var_gamma = prox_gamma(gamma,m_1_bar,m_2_bar,sigma)
#(m_1,m_2,w,D) = (var_m_1,var_m_2,var_w,var_D)
(m_1,m_2,w,D,P,u,gamma) = convex_comb(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(var_m_1,var_m_2,var_w,var_D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4,mfg=0)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta,mfg=0))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4556.58 s
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
#plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||_1)$')
plt.legend()
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_m.png', dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_m_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfgc_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_u.png', dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(Z)
maxu = np.max(Z)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_u[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfgc_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('relaxed_chambolle_pock_mfgc_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
def real_demand(Db,D_0,alpha,w,T,n):
dx = 1/n
D_eff = np.zeros(T-1)
for t in range(T-1):
D_eff[t] = (np.sum(alpha[t]*w[t])*dx + Db[t])
return(D_eff)
plt.plot(np.linspace(0,1,T-1),real_demand(Db,D_0,alpha,av_w,T,n), 'r-',label='D_eff')
plt.plot(np.linspace(0,1,T-1),Db,'dimgrey', label = r'$\bar{D}$')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Demand')
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_D.png', dpi=500, bbox_inches='tight')
plt.plot(np.linspace(0,1,T-1),av_P, 'r-',label='Price')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Price')
plt.savefig('relaxed_chambolle_pock_mfgc_constraint_P.png', dpi=500, bbox_inches='tight')
Inertial Chambolle-Pock¶
update
find
update
find
def inertie(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho):
m_1_next = var_m_1 + rho*(var_m_1 - m_1)
m_2_next = var_m_2 + rho*(var_m_2 - m_2)
w_next = var_w + rho*(var_w - w)
D_next = var_D + rho*(var_D - D)
P_next = var_P + rho*(var_P - P)
u_next = var_u + rho*(var_u - u)
gamma_next = var_gamma + rho*(var_gamma - gamma)
return(m_1_next,m_2_next,w_next,D_next,P_next,u_next,gamma_next)
MFG¶
T = 50
n = 50
alpha = np.zeros((T-1,n,n))
L = norm_A(alpha,n,T) + 1
sigma = 1/(L)
tau = 1/(L)
theta = 1
rho = 1/3-1e-2
beta = displacement_cost(T,n)
#nu = penalisation_congestion(T,n)
nu = np.zeros((T,n))
eta = sharp_penalisation_congestion(T,n)
D_0 = 1
Db = np.zeros(T-1)
m_0 = initial_mass(n)
m_1 = np.zeros((T,n)) + 1
m_2 = np.zeros((T,n)) + 1
w = np.zeros((T-1,n,n)) + 1
D = np.zeros(T-1)
(var_m_1,var_m_2,var_w,var_D)=(m_1,m_2,w,D)
P = np.zeros(T-1)
u = np.random.rand(T,n)
gamma = np.random.rand(T,n)
(var_P,var_u,var_gamma)=(P,u,gamma)
var_P = P
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = (m_1,m_2,w,D,u,gamma,P)
N = 10000
start = time.time()
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
(zm_1,zm_2,zw,zD,zP,zu,zgamma) = inertie(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho)
(m_1,m_2,w,D,P,u,gamma) = (var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma)
#(zm_1,zm_2,zw,zP,zu,zgamma) = (var_m_1,var_m_2,var_w,var_P,var_u,var_gamma)
var_m_2 = m_2_prox(zm_2,zgamma,nu,eta,tau,T,n)
(var_m_1,var_w) = m_1_w_proj(zP,zgamma,zu,zm_1,zw,T,n,tau,alpha,beta)
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,zm_1,zm_2,zw,zD,theta)
#var_P = P_prox_quad(P,w_bar,T,n,sigma,alpha,D_bar,D_0)
var_u = prox_u(zu,m_1_bar,w_bar,m_0,sigma,T,n)
var_gamma = prox_gamma(zgamma,m_1_bar,m_2_bar,sigma)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(m_1,m_2,w,D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4311.46 s
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
#plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||)$')
plt.legend()
plt.savefig('inertial_chambolle_pock_mfg_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='YlOrRd')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('inertial_chambolle_pock_mfg_constraint_m.png',dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfg_constraint_m_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfg_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('inertial_chambolle_pock_mfg_constraint_u.png',dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(Z)
maxu = np.max(Z)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfg_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_u[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfg_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = av_gamma
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('gamma')
plt.savefig('inertial_chambolle_pock_mfg_constraint_gamma.png',dpi=500, bbox_inches='tight')
Equilibrium strategy
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('inertial_chambolle_pock_mfg_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfg_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfg_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
MFGC¶
T = 50
n = 50
alpha = alpha_cost(T,n)
L = norm_A(alpha,n,T) + 1
sigma = 1/L
tau = 1/L
theta = 1
rho = 1/3-1e-2
Dmin = -2
Dmax = 0
beta = displacement_cost(T,n)
nu = np.zeros((T,n))
D_0 = 1/2
Db = reference_demand(T)*2
m_0 = initial_mass(n)
m_1 = np.zeros((T,n))
for t in range(T):
m_1[t] = m_0
m_2 = m_1
w = np.zeros((T-1,n,n))
D = np.zeros(T-1)
P = np.zeros(T-1)
u = np.random.rand(T,n)
gamma = np.zeros((T,n))
(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma) = (m_1,m_2,w,D,P,u,gamma)
N = 10000
start = time.time()
mfg_error = np.zeros((N,5))
ev_m_s = np.zeros((N,T-1,n))
ev_m = np.zeros((N,T,n))
ev_u = np.zeros((N,T,n))
start = time.time()
for i in range(N):
print(round(i/N*100, 2)," \r",end = '')
(zm_1,zm_2,zw,zD,zP,zu,zgamma) = inertie(var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma,m_1,m_2,w,D,P,u,gamma,rho)
(m_1,m_2,w,D,P,u,gamma) = (var_m_1,var_m_2,var_w,var_D,var_P,var_u,var_gamma)
var_D = D_prox_quad(zD,zP,T,n,tau,alpha,Db,D_0,Dmin,Dmax)
(var_m_1,var_w) = m_1_w_proj(zP,zgamma,zu,zm_1,w,T,n,tau,alpha,beta)
#var_m_2 = zm_2 + tau*zgamma
(m_1_bar,m_2_bar,w_bar,D_bar) = relax(var_m_1,var_m_2,var_w,var_D,zm_1,zm_2,zw,zD,theta)
var_P = prox_P(zP,D_bar,w_bar,T,n,sigma,alpha)
var_u = prox_u(zu,m_1_bar,w_bar,m_0,sigma,T,n)
#var_gamma = prox_gamma(zgamma,m_1_bar,m_2_bar,sigma)
(av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P) = ergodic(m_1,m_2,w,D,u,gamma,P,av_m_1,av_m_2,av_w,av_D,av_u,av_gamma,av_P,i)
(U,Pi) = d_p_mapping(av_m_1,av_w,av_gamma,av_P,alpha,beta,T,n,tol = 1e-4,mfg=0)
mfg_error[i] = np.array(verification(av_P,U,av_gamma,av_m_1,Pi,av_w,T,n,beta,nu,m_0,alpha,Db,Dmin,Dmax,eta,mfg=0))
(ev_m_s[i],ev_m[i],ev_u[i]) = (mean_field_strategy(Pi,T,n),av_m_1,U)
end = time.time()
print("\n execution time :",round(end-start,2), "s")
99.99
execution time : 4441.6 s
#plt.plot(np.log(mfg_error[:,0])/np.log(10), label = r'$\log(||\varepsilon_u||_1)$', color = 'blue')
plt.plot(np.log(mfg_error[:,1])/np.log(10), label = r'$\log(||\varepsilon_\pi||_1)$', color = 'orange')
plt.plot(np.log(mfg_error[:,2])/np.log(10), label = r'$\log(||\varepsilon_m||_1)$', color = 'purple')
#plt.plot(np.log(mfg_error[:,4])/np.log(10), label = r'$\log(||\varepsilon_{\gamma}||_1)$', color = 'green')
plt.plot(np.log(mfg_error[:,3])/np.log(10), label = r'$\log(||\varepsilon_P||_1)$', color = 'red')
plt.xlabel('iteration')
plt.ylabel(r'$\log(||\varepsilon||_1)$')
plt.legend()
plt.savefig('inertial_chambolle_pock_mfgc_constraint_error.png', dpi=500, bbox_inches='tight')
plt.show()
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, t)
Z = av_m_1
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='binary')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='YlOrRd', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='v£iridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('m')
plt.savefig('inertial_chambolle_pock_mfgc_constraint_m.png', dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = av_m_1
minm = np.min(m_1_bar)
maxm = np.max(m_1_bar)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='YlOrRd')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfgc_constraint_m_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="YlOrRd",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfgc_constraint_m_convergence.mp4',writer='ffmpeg',fps=fps)
X, Y = np.meshgrid(y, t)
Z = U
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('value')
plt.savefig('inertial_chambolle_pock_mfgc_constraint_u.png', dpi=500, bbox_inches='tight')
X, Y = np.meshgrid(t, y)
Z = U
minu = np.min(Z)
maxu = np.max(Z)
levels = np.linspace(minu,maxu,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='viridis')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfgc_constraint_u_contour.png',dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_u[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="viridis",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfgc_constraint_u_convergence.mp4',writer='ffmpeg',fps=fps)
ti = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
X, Y = np.meshgrid(y, ti)
Z = mean_field_strategy(Pi,T,n)
fig = plt.figure()
ax = plt.axes(projection='3d')
#ax.contour3D(X, Y, Z, 50, cmap='magma')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='inferno', edgecolor='none')
#ax.plot_wireframe(X, Y, Z, rstride=1, cstride=1, cmap='viridis', edgecolor='none')
ax.set_xlabel('state')
ax.set_ylabel('time')
ax.set_zlabel('mean strategy')
plt.savefig('inertial_chambolle_pock_mfgc_constraint_mean_strategy.png', dpi=500, bbox_inches='tight')
minm = np.min(Z)
maxm = np.max(Z)
levels = np.linspace(minm,maxm,10)
fig, ax = plt.subplots()
im = ax.imshow(Z, interpolation='bilinear', origin='lower',
cmap='inferno')
plt.axis('off')
CS = ax.contour(Z,levels, origin='lower', colors='black',
linewidths=1)
CBI = fig.colorbar(im)
plt.savefig('inertial_chambolle_pock_mfgc_constraint_mean_strategy_contour.png', dpi=500, bbox_inches='tight')
t = np.linspace(0, 1, T-1)
y = np.linspace(0, 1, n)
Nb_im = 2000
X, Y = np.meshgrid(y, t)
Z = ev_m_s[:Nb_im]
def update_plot(frame_number, zarray, plot):
plot[0].remove()
plt.title('Iteration :%s'%frame_number)
plot[0] = ax.plot_surface(X, Y, Z[frame_number,:,:], cmap="inferno",edgecolor='none')
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
fps = 100
plot = [ax.plot_surface(X, Y, Z[0,:,:], rstride=1, cstride=1)]
ani = animation.FuncAnimation(fig, update_plot, Nb_im, fargs=(Z, plot), interval=2000/fps)
ani.save('inertial_chambolle_pock_mfgc_constraint_mean_strategy_convergence.mp4',writer='ffmpeg',fps=fps)
def real_demand(Db,D_0,alpha,w,T,n):
dx = 1/n
D_eff = np.zeros(T-1)
for t in range(T-1):
D_eff[t] = (np.sum(alpha[t]*w[t])*dx + Db[t])
return(D_eff)
plt.plot(np.linspace(0,1,T-1),real_demand(Db,D_0,alpha,av_w,T,n), 'r-',label='D_eff')
plt.plot(np.linspace(0,1,T-1),Db,'dimgrey', label = r'$\bar{D}$')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Demand')
plt.savefig('inertial_chambolle_pock_mfgc_constraint_D.png', dpi=500, bbox_inches='tight')
plt.plot(np.linspace(0,1,T-1),av_P, 'r-',label='Price')
plt.legend(loc='upper right',
ncol=2)
plt.xlabel('time')
plt.ylabel('Price')
plt.savefig('inertial_chambolle_pock_mfgc_constraint_P.png', dpi=500, bbox_inches='tight')
- CP11
Antonin Chambolle and Thomas Pock. A first-order primal-dual algorithm for convex problems with applications to imaging. Journal of mathematical imaging and vision, 40(1):120–145, 2011.